בית החינוך המשותף חוף השרון | ההנדסייה - סדנה מייקרית בבית הספר
DC Motor - מנוע זרם ישר



הסבר פעולת הרכיב:
המנוע בנוי משלושה חלקים עיקריים: סטטור, רוטור ומברשות (פחמים).
בתוך הסטטור יש שני מגנטים קבועים שיוצרים שדה מגנטי בעל גודל וכיוון קבועים. המברשות מקבלות זרם חיצוני, ובקצותיוהן יש חלקי פחם גמישים שבאים במגע עם הקומיוטייטור ומעבירים לו את הזרם.
הרוטור הוא החלק שמסתובב בתוך המנוע והוא מורכב על הציר. הרוטור בנוי מסלילי נחושת אלקטרומגנטיים. כאשר מעבירים זרם בסליל נחושת שעל גבי הרוטור נוצר כוח אלקטרומגנטי בסליל.
בקצות סלילי הנחושת מחוברים לוחות המתכת של הקומיוטייטור. כל אחד מהלוחות מחובר לליפוף אחר של חוט נחושת. כאשר הרוטור מסתובב, הזרם עובר כל פעם ללוח אחר בקומיוטייטור וזה שומר על כך שהכוח שמסובב את הרוטור נשאר בכיוון קבוע.



הסבר פנימי:
אופן פעולת הרכיב – הסבר פנימי:
פעולת הרכיב מבוססת על עקרונות פיזיקליים של מגנטיות וכוחות משיכה-דחייה.
בתוך הסטטור יש מגנטים קבועים, אחד חיובי ואחד שלילי. אם בין המגנטים יהיה אלקטרומגנט אחד, הקוטב הצפוני של האלקטרומגנט ירצה להתקרב אל המגנט הדרומי ולהיפך.
בגלל החיבור של הסליל האלקטרומגנטי אל הציר, זה יגרום לתנועה הסיבובית.
בשביל להבין יותר טוב את הפיזיקה מאחורי זה נשתמש בחוק יד ימין.
לפי חוק יד ימין, כיוון הזרם על תיל (במקרה שלנו זרם ע סליל נחושת), כיוון השדה המגנטי שנוצר וכיוון הכוח המגנטי שנוצר, כולם מאונכים אחד לשני. לכן שכמו שרואים בgif, כיוון השדה קבוע (לפי הדוגמה, ימינה). ולכן כאשר הזרם הולך "קדימה" אז כיוון הכוח המגנטי הוא למעלה. כשהזרם הולך "אחורה" אז הכוח הוא למטה.
הכוח המגנטי הוא זה שמסובב את הרוטור. מכאן נגזרת גם החשיבות של המברשות ושל הקומיוטייטור. אם על כל סליל היה כיוון זרם קבוע, המנוע היה עוצר בנקודת שיווי משקל. בעזרת הפחמים והקומיוטייטור, כאשר המנוע משלים חלק מהסיבוב, כיוון הזרם בתילים מתהפך ולכן נשמרת התנועה המעגלית.

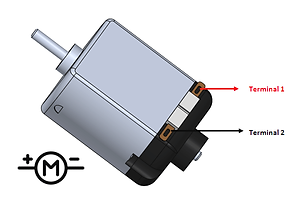
Pinout:
בתמונה שני החיבורים של המנוע.
שניהם יכולים לשמש גם כפלוס וגם כמינוס. החלפה ביניהם פשוט תגרום להחלפה בכיוון הסיבוב של המנוע.
דיאגרמת חיווט:
אפשר לחבר מנוע לארדואינו כאשר אחד הפינים מחובר לאדמה והשני לכל פין דיגיטלי או אנלוגי. זה מאפשר קביעה מראש של מהירות המנוע, והעברת מתח שמגיע רק עד 5V.
ארדואינו לא יכול להפוך כיוון זרם, ולא יכול לספק זרם מעל 200mA. זרם זה בדרך כלל לא יספיק מפני שבעיקר תחת עומס מנוע DC צורכים הרבה יותר. ארדואינו גם מוגבל ליצוא מתח של עד 5V, שלא מספיק לרוב המנועים. לכן משתמשים בבקר מנועים.
ישנם הרבה בקרי מנועים, כל אחד עם יתרונות וחסרונות שונים. בקר המנועים הספציפי שבתמונה הוא זה שנראה לי הכי נוח לשימוש. הוא של חברת adafruit ואפשר לחבר אליו עד 4 מנועי DC (או 2 מנועי SERVO או 2 מנועי Stepper) בחיבורים המסומנים באות M בדיאגרמה הנתונה המנוע מחובר לM4. בקר המנועים יכול להפוך כיוון זרם ולכן גם את כיוון הסיבוב של המנוע. מכאן גם שלא משנה איזה רגל של המנוע מתחברת לאיזו פתחה (פורט). בעזרת מקור מתח חיצוני בקר המנועים גם יכול לייצא יותר זרם ומתח ולכן להפעיל יותר מנועים.

קוד לדוגמה:

הקוד לקוח מאתר adafruit
תיאור קוד לדוגמה:
הקוד מתאים להפעלת המנוע בשימוש בקר מנועים של adafruit.
הפקודה AF_DCMotor מגדירה את המנוע. בקוד הנתון המנוע מוגדר לM2.
סטאפ:
הפקודה Serial.begin(9600) מפעילה מסך סיראלי.
הפקודה Serial.println שולחת הודעה במסך הסיריאלי בשורה חדשה.
הפקודה motor.setSpeed קובעת את מהירות המנוע.
לופ:
הפקודה motor.run קובעת את תנועת המנוע בהתאם לשלוש אפשרויות:
FORWARD - קדימה.
BACKWARD - אחורה.
RELEASE - שחרור - עצירה.
כותב במסך "טיק" ומסובב את המנוע קדימה 1000 מילי-שניות.
כותב במסך "טוק" ומסובב את המנוע אחורה למשך 1000 מילי-שניות.
כותב במסך "טק" ולא מסובב את המנוע (המנוע עוצר) למשך 1000 מילי-שניות.
הקוד הזה שימושי גם בשביל לבדוק אם המנוע עובד, וגם בכללי להפעלה של מנוע DC
קבצים מצורפים: (קוד, ספריות):
ספריית adafruit motor shield.
חלופות לרכיב:
מנוע צעד:
המנוע הזה מחלק את הסיבוב שלו ל"צעדים" שווים בגודלם. גם המנוע הזה משמש לתנועה מאוד מדויקת.
יתרונות:
-
יש לו "כוח החזק" מאוד גבוה - קשה מאוד לסובב אותו עם כוח חיצוני.
-
יש לו מבנה מכני יחסית פשוט ולכן לא נדרשת לו תחזוקה שוטפת.
חסרונות:
-
בדרך כלל רועש.
-
פועל בהספק נמוך.

מנוע SERVO:
מערכת בקרה בחוג סגור המורכבת ממנוע DC ואינקודר. בשונה ממנוע DC, הסרבו הוא בשביל חלקי סיבוב קטנים שנמדדים בזוויות. לכן הוא יותר מדויק. נוח יחסית לשלוט בסרבו ללא בקר מנועים. ויש לו יותר כוח
מאשר מנוע DC רגיל מפני שיש לו תמסורת הפחתה.
יתרונות:
-
בדרך כלל מנועים קטנים פיזית.
-
כוח זוויתי גדול ביחס לגודלם.
-
יש לו בקרה פנימית (פועל בחוג סגור).
-
פועל בדרך כלל בזרם נמוך יחסית (4-6V)
-
בדרך כלל דיי זול.
חסרונות:
-
רוב מנועי הסרבו יכולים להסתובב רק 180 מעלות.

טיפים מועילים:
חשוב לא להעמיס על המנוע מפני שזה יכול לשרוף אותו.
ממליץ מאוד על בקר המנועים של adafruit מפני שהוא נותן שליטה מלאה על המנוע.
אם רוצים שהמנוע יסתובב מאוד מהר/מאוד לאט, כדאי להכין בשבילו תמסורת.
מבחינת מנועים שיש בסדנה, בדרך כלל המנועים המהירים יותר הם חלשים יותר. לכן אני חושב שהמנוע היא נוח לעבודה הוא המנוע הצהוב (ידוע גם כמנוע TT), מפני שהוא גם יחסית מהיר וגם יש לו מספיק כוח בשביל רוב הפרויקטים שעושים בהנדסייה.
